


Una forma divertida de aplicar conocimientos adquiridos sobre Arduino es el montaje de un coche con dos ruedas motrices (Two Drive Wheels) controlado desde un dispositivo móvil a través de Bluetooth.
Vamos a comenzar una serie de entradas en el blog con las diferentes fases de montaje y creación de este proyecto maker sencillo con el montaje del chasis de lo que va a ser nuestro coche. Existe la posibilidad de diseñarlo por nuestra cuenta e imprimirlo en una impresora 3D, lo cual podría suponer otro proyecto a realizar, pero hay tal variedad de kits bastantes económicos en el mercado que no merece la pena fabricarlo por nuestra a cuenta a no ser, como decíamos antes, que queramos realizar algo original y practicar con la impresión en 3D. Hemos elegido por tanto un kit de los mencionados con anterioridad con todos los elementos que vamos a precisar para nuestro proyecto.

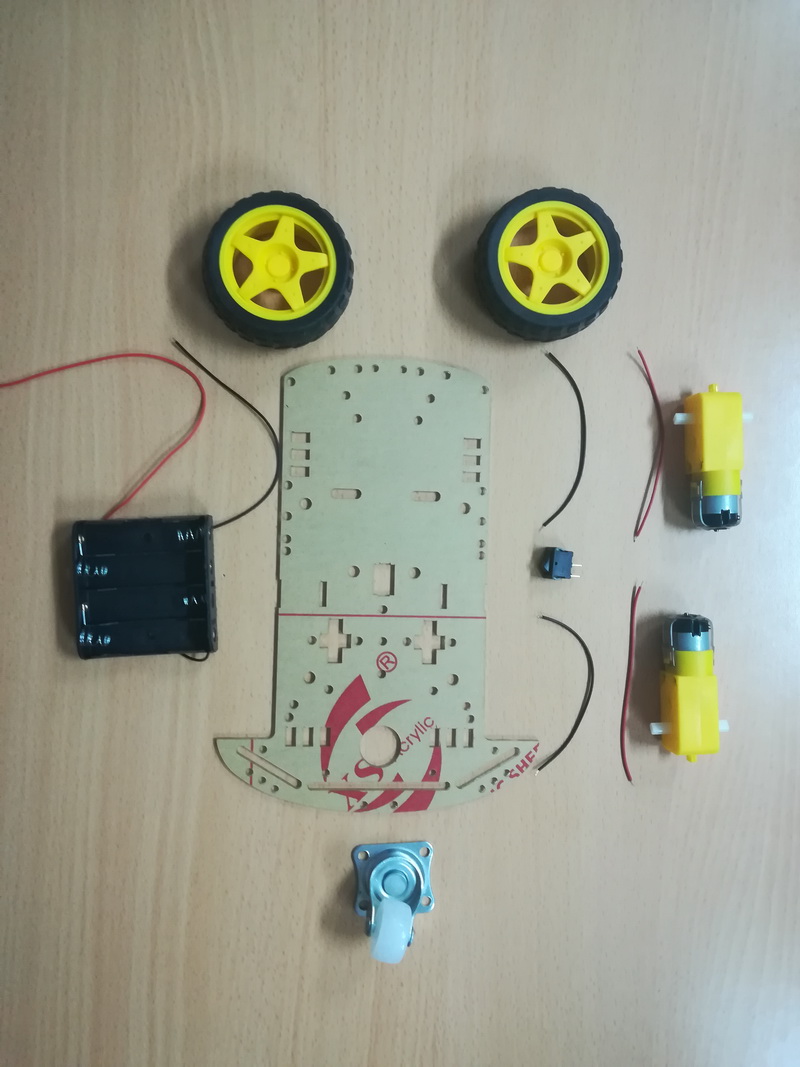
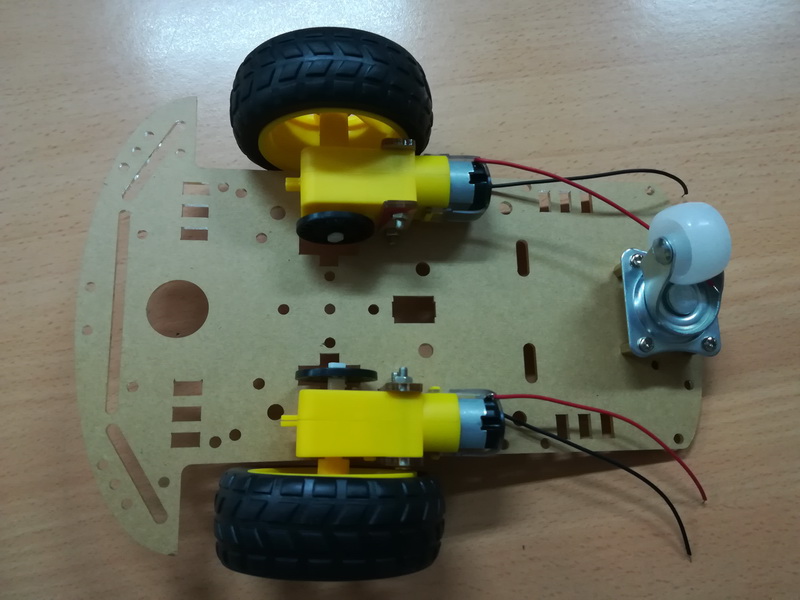
El kit viene con una plataforma perforada y toda la tornillería para poder montar los dos motores que moverán las ruedas, una rueda loca, un portapilas y un interruptor.
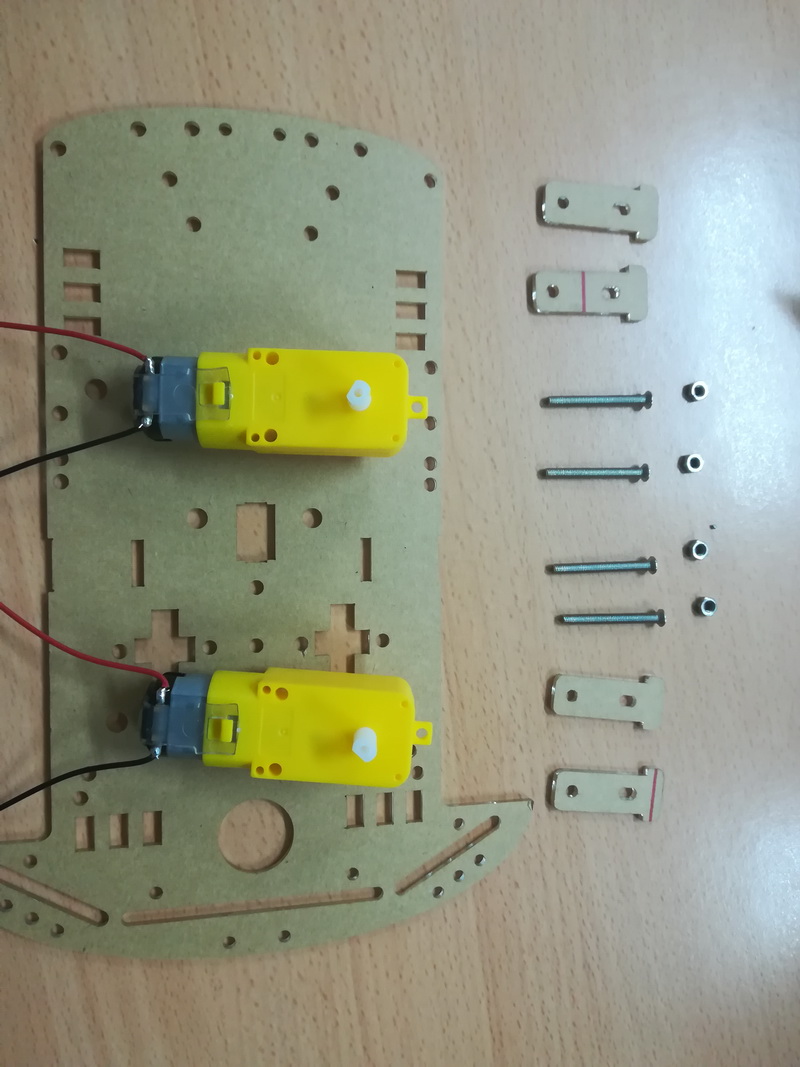
Comenzaremos el montaje conectándole los cables a los motores. Lo haremos con una pequeña soldadura. No es importante como conectemos los cables ya que luego podremos intercambiar las conexiones que realicemos con ellos o cambiarlo en la programación.

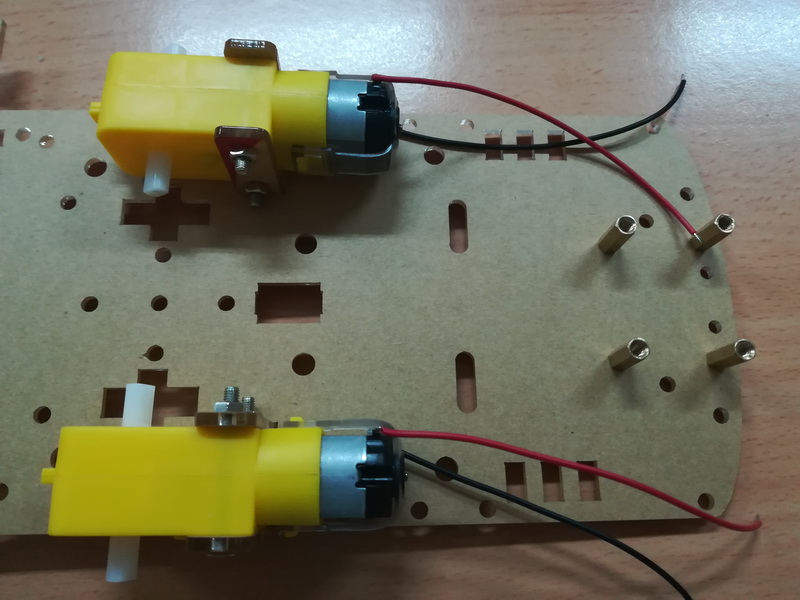
Procederemos ahora a colocar los motores en la plataforma con las piezas y tornillería incluidas en el kit
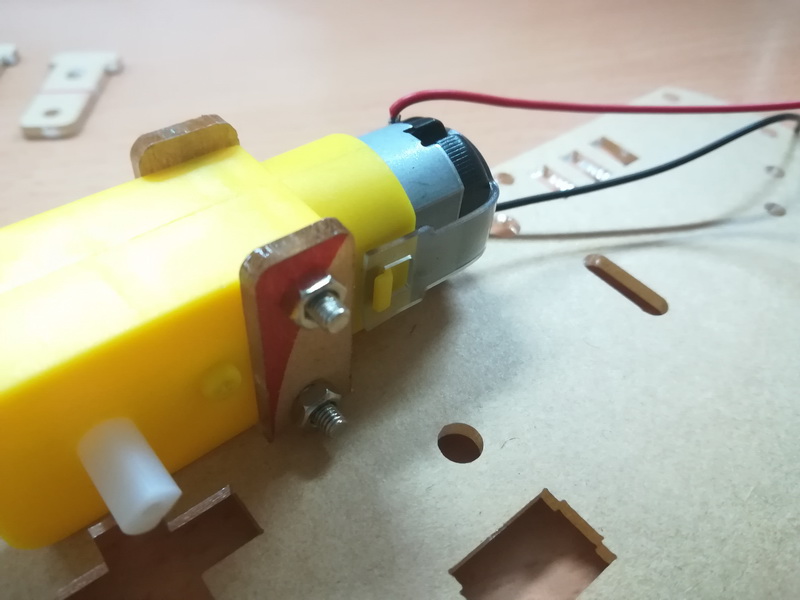
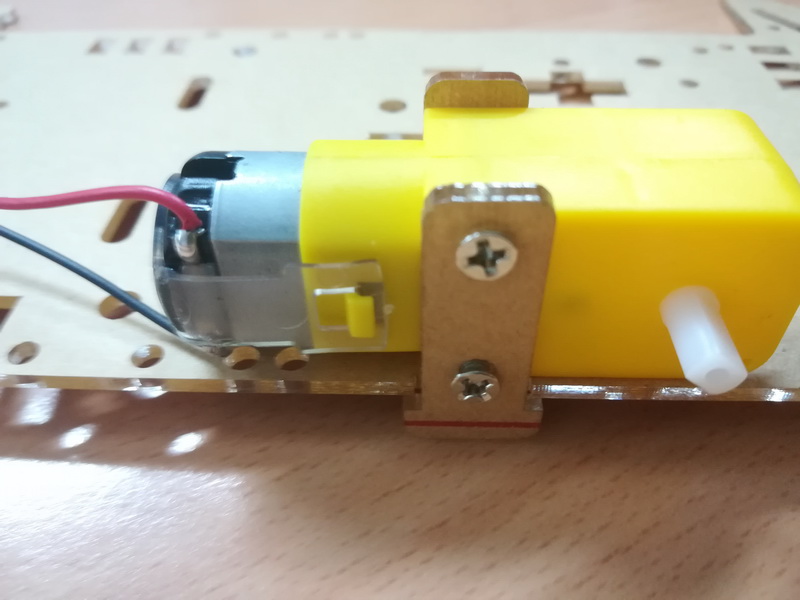
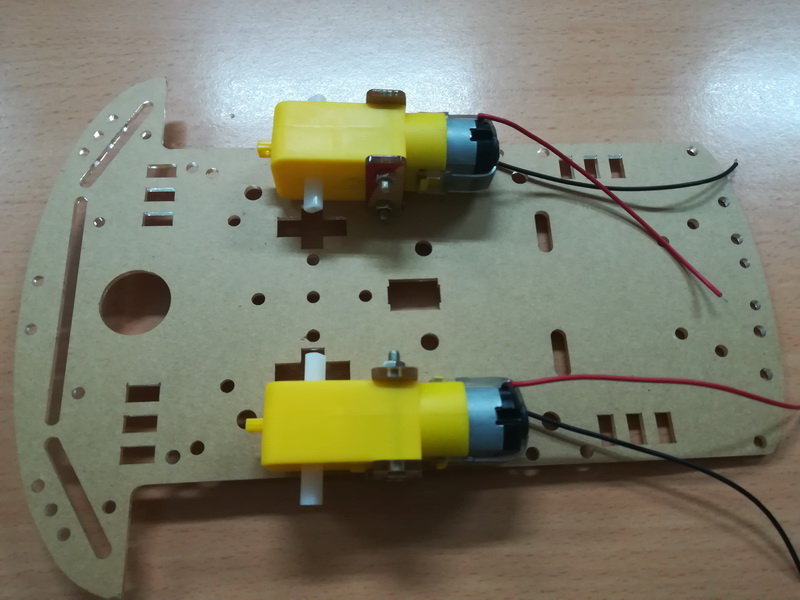
Aunque la tendencia sería instalarlos de forma simétrica (lo siento por aquellos que tenéis un trastorno obsesivo compulsivo), es conveniente hacerlo de forma que los cables queden en la misma posición en los dos motores. La razón es porque los motores no giran igual en ambos sentidos y esta instalación posibilita que el coche se desplace lo más cerca posible de la línea recta al girar ambos a la misma velocidad aproximadamente.
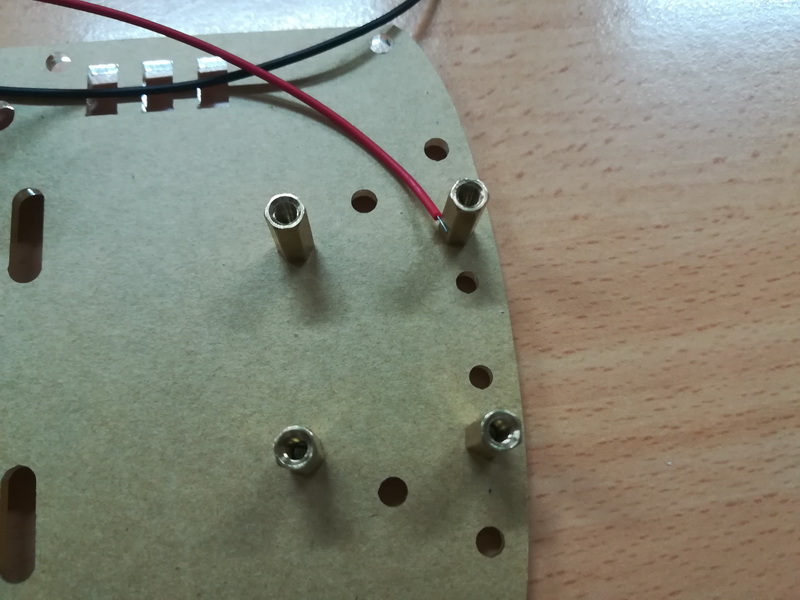
Vamos ahora a realizar la instalación de la rueda loca que permitirá el giro de nuestro coche utilizando los separadores y los tornillos incluidos en el kit.


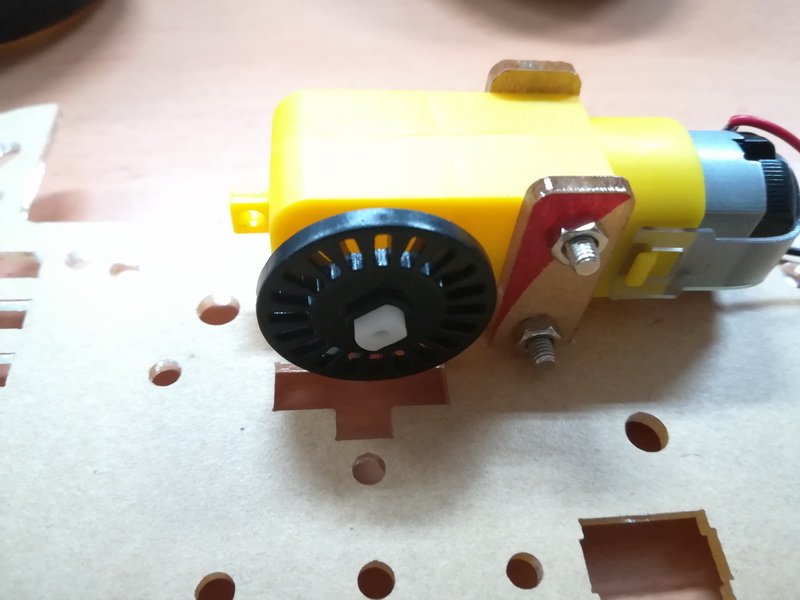
Es el momento ahora de colocar las ruedas en los motores. En primer lugar colocaremos los discos encoders, esas ruedas oscuras pequeñas, que en este proyecto no vamos a utilizar, pero que sirven para igualar la velocidad de giro de ambos motores y que constituye una posibilidad de mejora y ampliación de nuestro proyecto. Nos aseguraremos de que ningún elemento roce con la plataforma para que nuestros motores no sean frenados, ni que tampoco rocen las ruedas con el final del eje del motor.

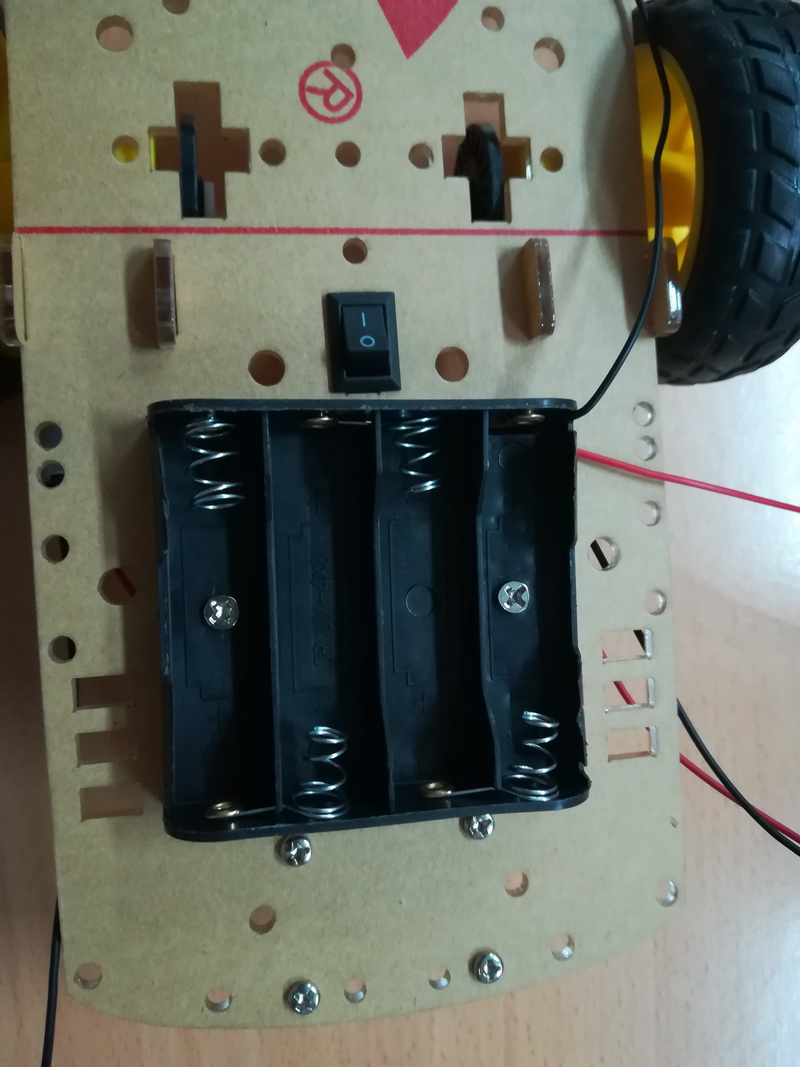
El paso siguiente es colocar el interruptor en el hueco ad hoc que existe en la plataforma para ello.

Concluimos el montaje del chasis con la instalación del portapilas que nos proporcionará la energía necesaria para mover nuestro sencillo coche robot 2WD.
El paso siguiente será la realización de las conexiones entre los diferentes elementos que constituyen nuestro proyecto. Puedes seguirlo pulsando en el botón de abajo.
