


Vamos a intentar detallar en esta entrada del blog de la manera más sencilla posible las diferentes conexiones que hay que realizar para que nuestro robocar 2WD funcione de manera correcta.
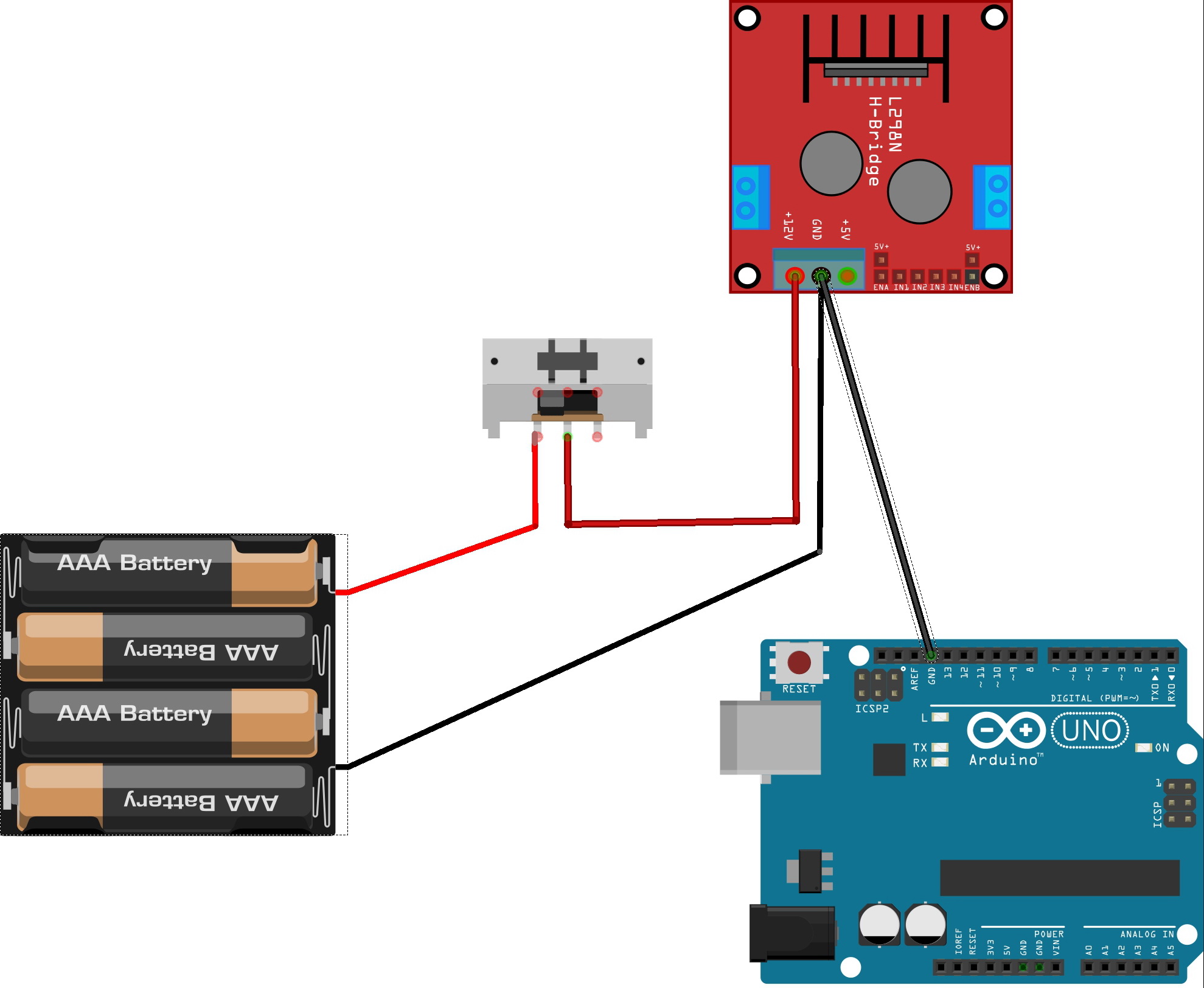
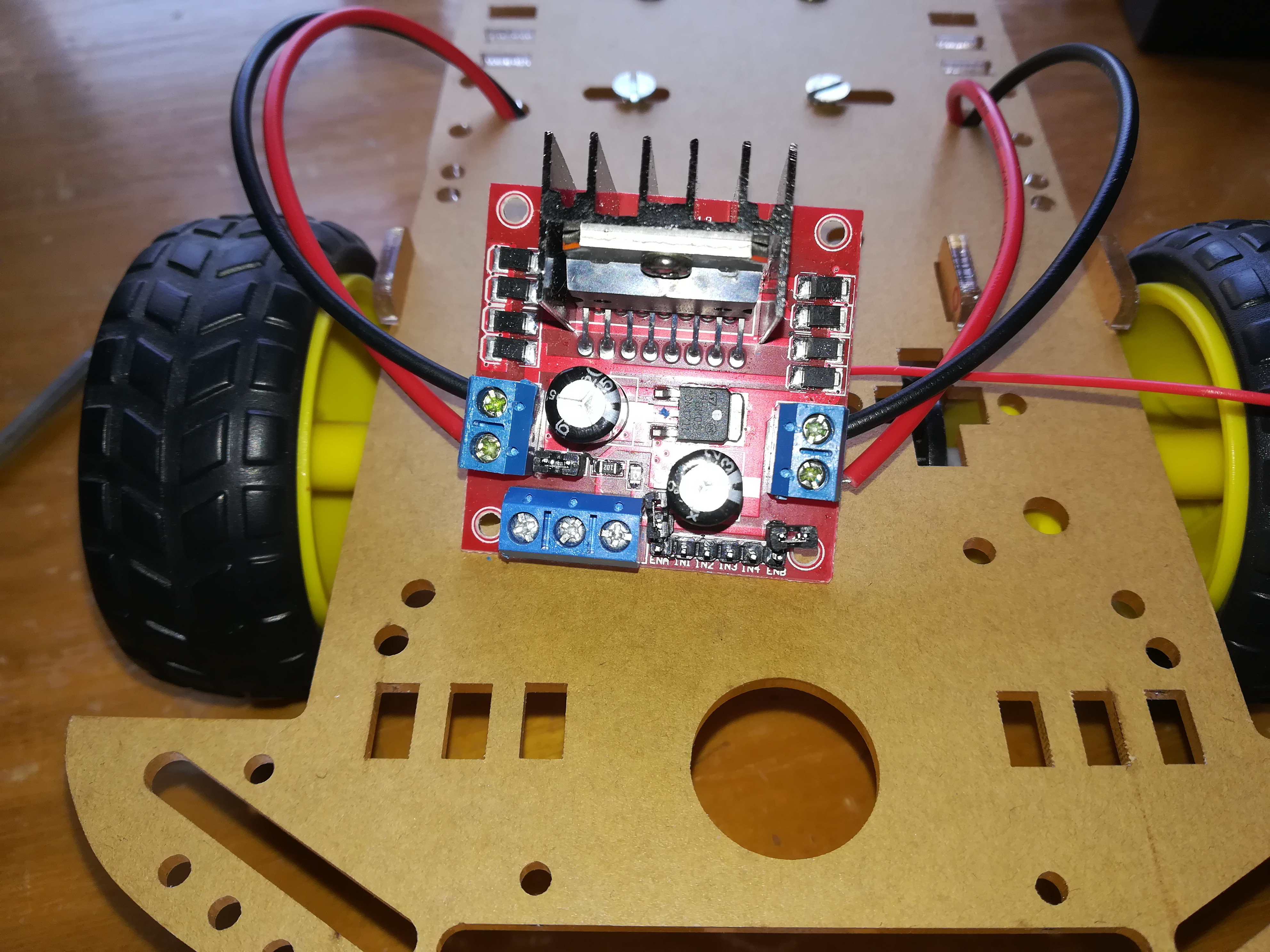
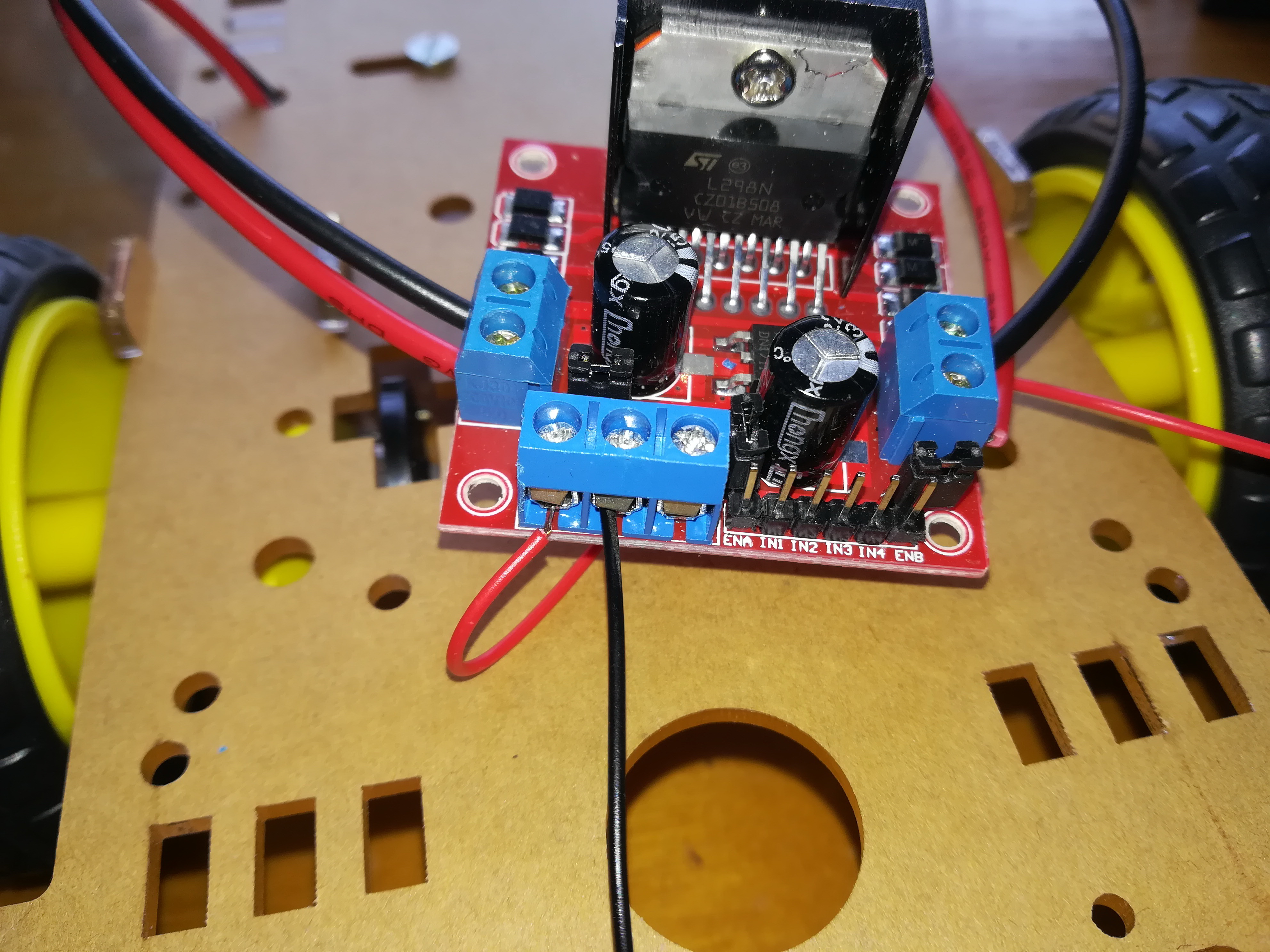
Comenzaremos por la conexión del portapilas y el interruptor. El cable negro del portapilas lo conectaremos directamente a GND del módulo L298N y a GND de nuestra placa Arduino. El cable rojo lo cortaremos para hacerlo pasar por el interruptor. La medida a la que lo debemos cortar debemos realizarla de manera que no tengamos luego problemas con la longitud de los cables. Siempre es preferible que sobre y que no tengamos problemas a la hora de posicionar los elementos. Conectaremos el cable rojo que proviene del portapilas a uno de los terminales del interruptor y el trozo que hemos cortado al otro terminal del interruptor. El extremo libre del cable rojo lo conectaremos en la entrada Vin del módulo L298N.
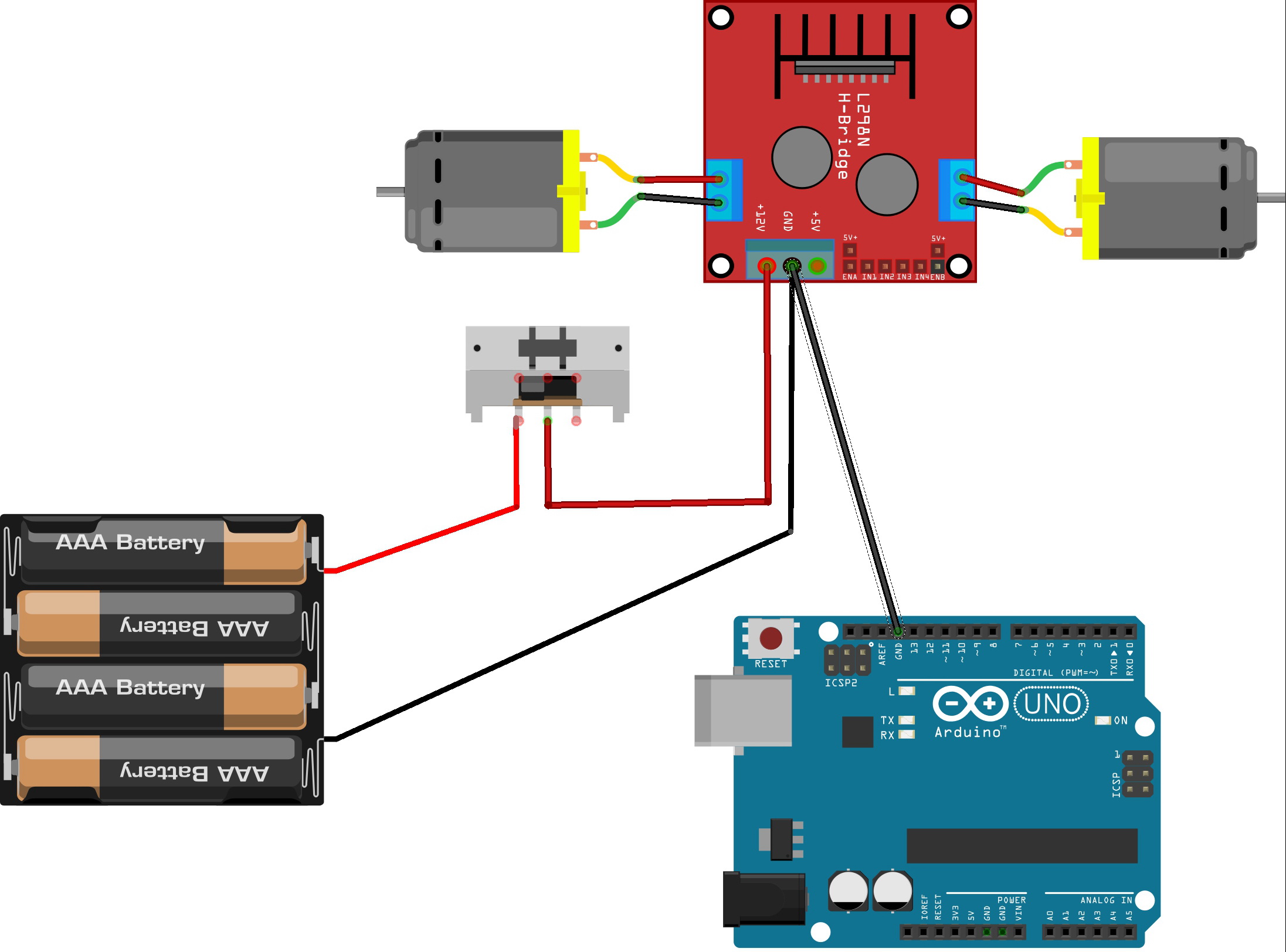
A continuación conectamos los cables de los motores al módulo L298N.
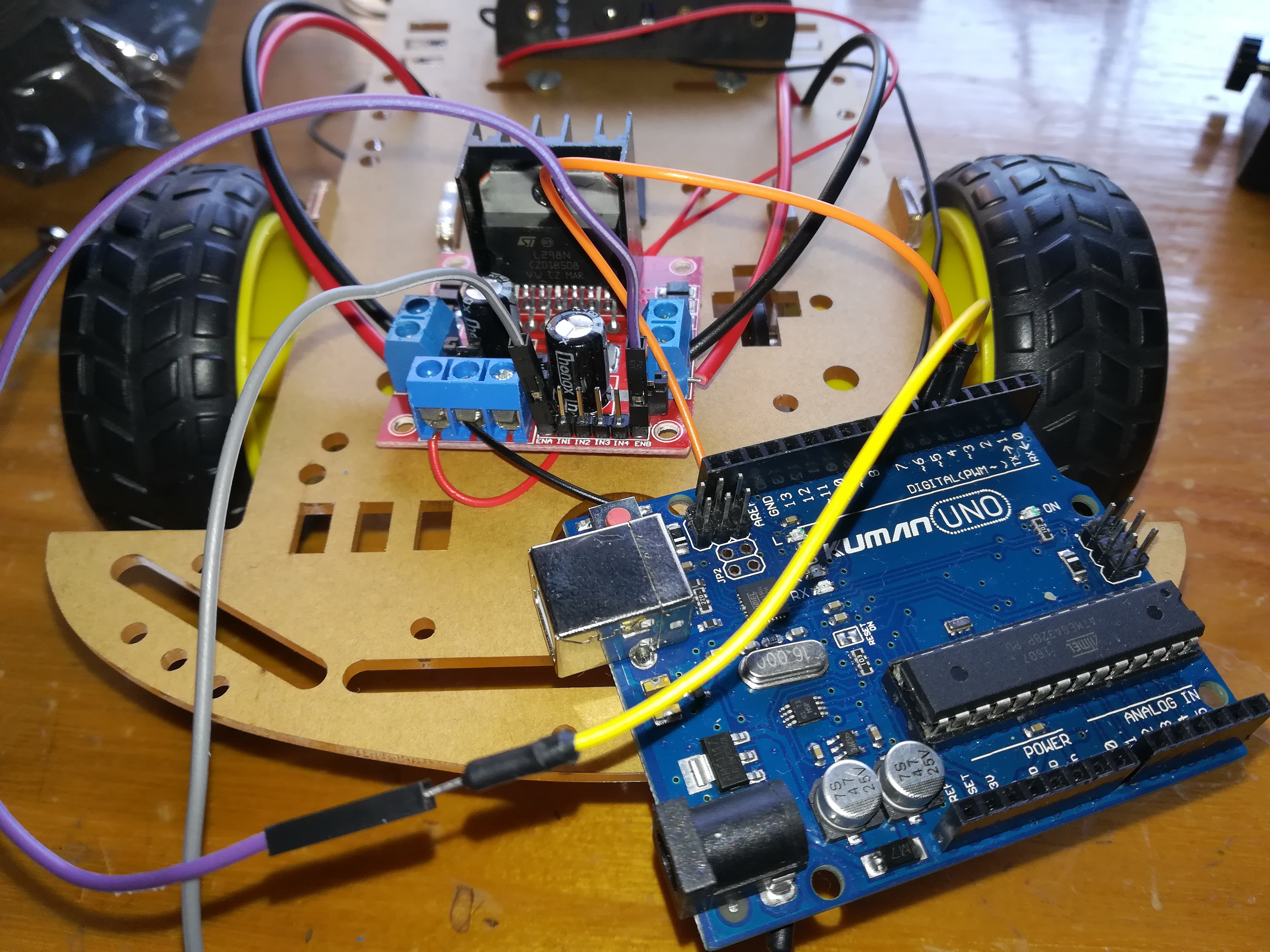
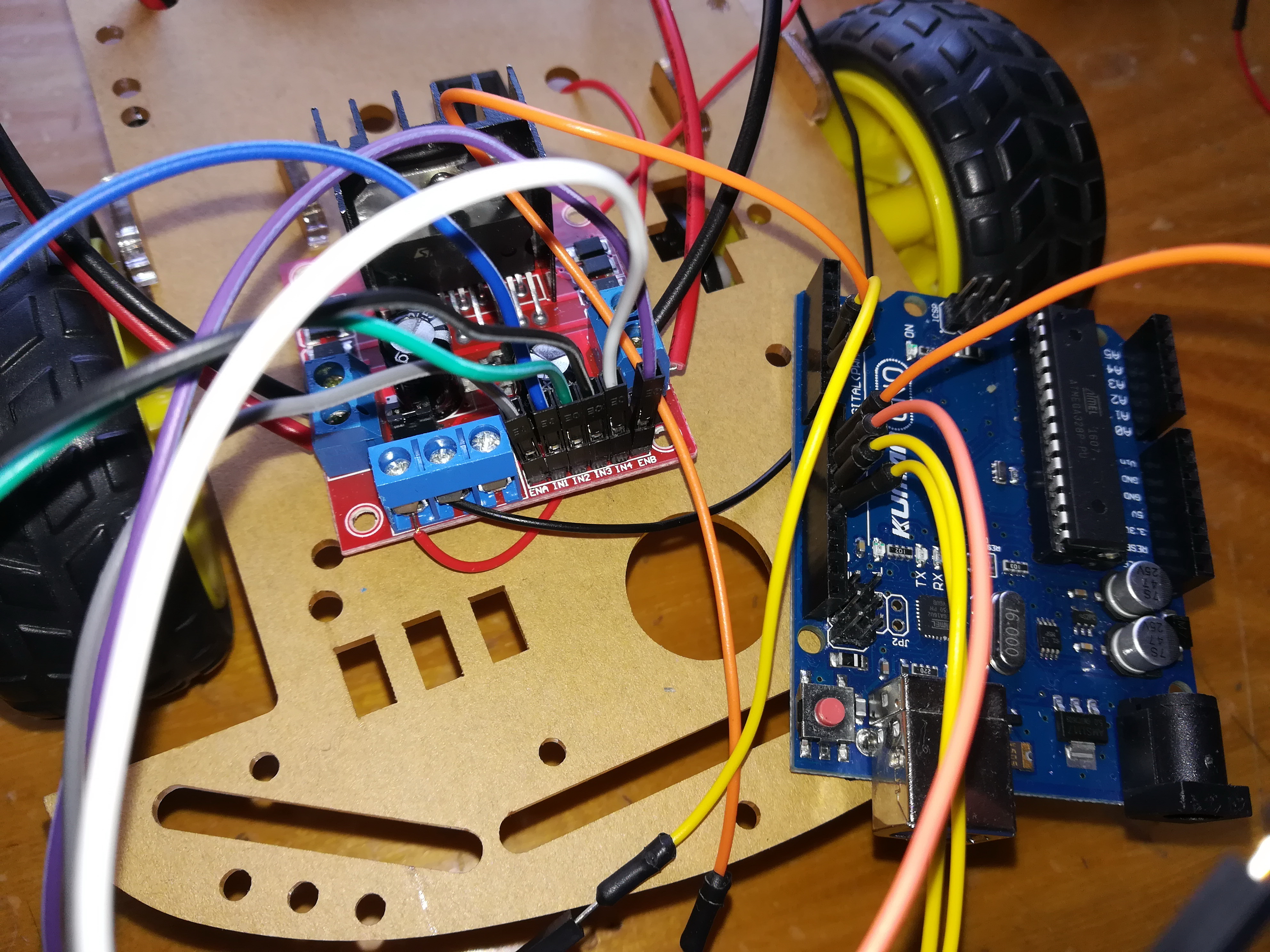
Alimentamos nuestro Arduino desde +5V del módulo L298N y realizamos todas la conexiones de los pines de nuestro Arduino con los del módulo L298N.
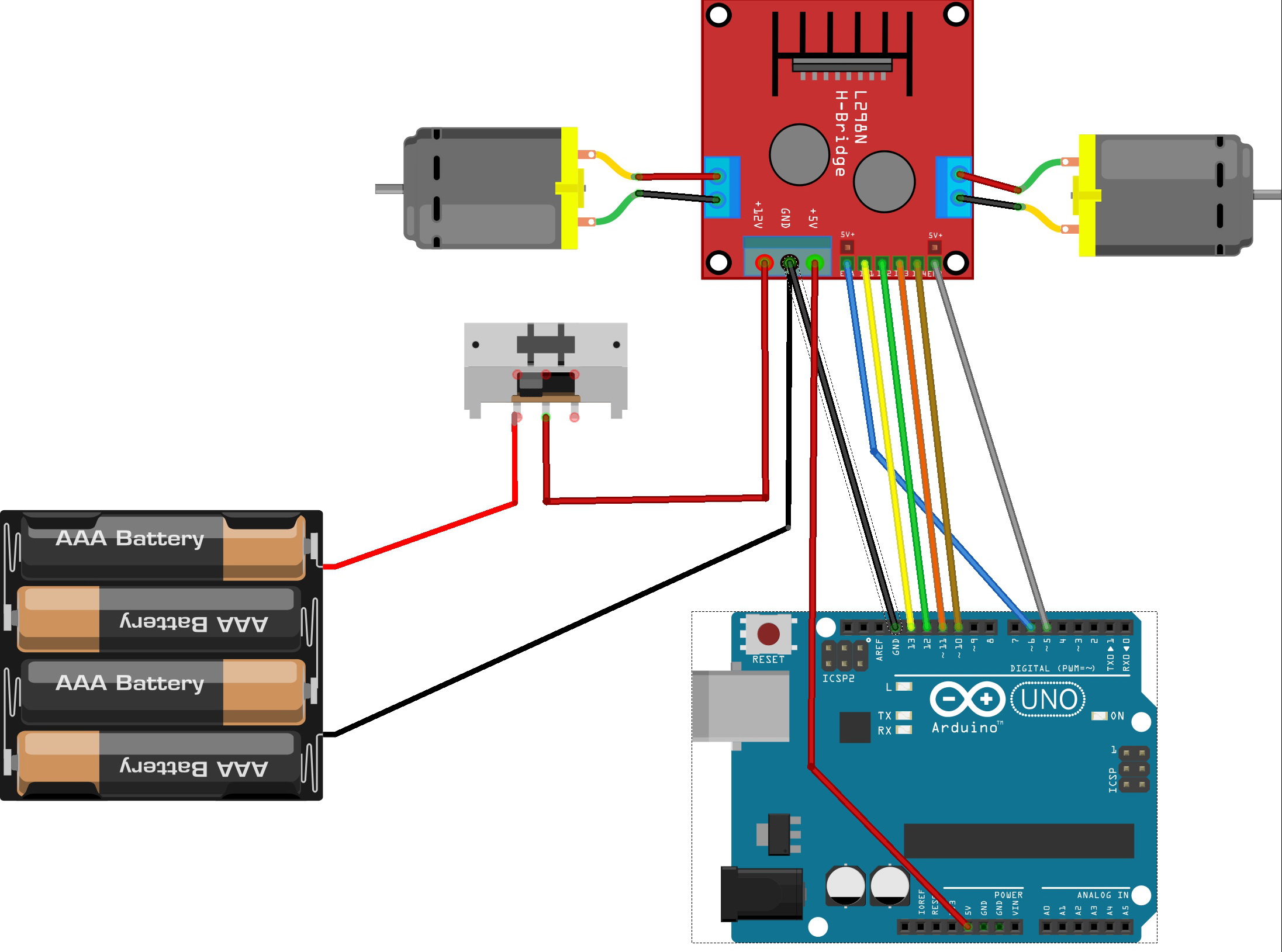
Una vez realizadas estas conexiones colocamos las pilas y al accionar el interruptor deberían iluminarse los LEDs de alimentación de Arduino y del L298N. Si no es así habrá que revisar si las conexiones están realizadas de forma correcta.
Vamos a comprobar ahora el funcionamiento de los motores y a realizar las correcciones que fueran necesarias. Para ello vamos a cargar en nuestro Arduino un sketch sencillo como el que sigue:
/*
* Sketch para prueba de funcionamiento
* de motores utilizando un módulo
* L298N
*
*Esta dirección de correo electrónico está siendo protegida contra los robots de spam. Necesita tener JavaScript habilitado para poder verlo.
*/
// Motor A
int ENA=6; //pin PWM para regulación velocidad
int IN1=13; //pin para controlar el motor
int IN2=12; //pin para controlar el motor
// Motor B
int ENB=5; //pin PWM para regulación velocidad
int IN3=11; //pin para controlar el motor
int IN4=10; //pin para controlar el motor
int vel=125; //variable para variar velocidad (0-255)
void setup() {
pinMode(ENA,OUTPUT);
pinMode(ENB,OUTPUT);
pinMode(IN1,OUTPUT);
pinMode(IN2,OUTPUT);
pinMode(IN3,OUTPUT);
pinMode(IN4,OUTPUT);
}
void loop() {
// Motor A adelante
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH);
analogWrite(ENA,vel);
delay(3000);
// Motor A atrás
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW);
analogWrite(ENA,vel);
delay(3000);
// Motor B adelante
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH);
analogWrite(ENB,vel);
delay(3000);
// Motor B atrás
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW);
analogWrite(ENB,vel);
delay(3000);
}
El programa hará que el motor A gire en un sentido, se detiene 3 segundos y gire en sentido contrario y se dentega 3 segundos. A continuación el motor B realizará la misma secuencia. Si alguno de los motores no girase como pretendíamos bastará con intercambiar los pines IN correspondientes en el módulo L298N hasta que consigamos que los motores se muevan en el sentido deseado.
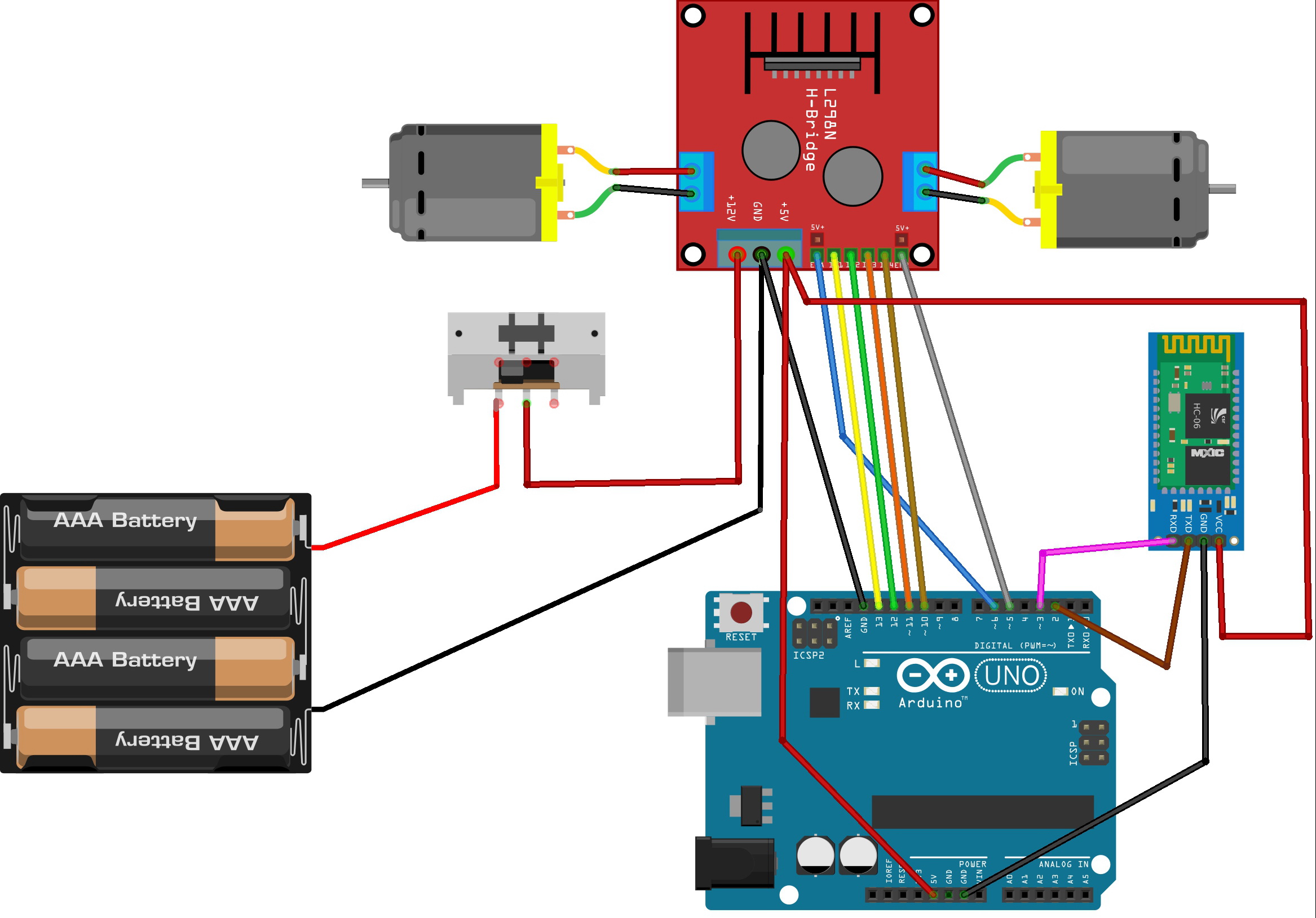
Por último queda por conectar el módulo HC-06 que nos servirá para establecer la conexión Bluetooth con nuestro teléfono móvil. Para ello conectaremos los pines Rx y Tx del módulo HC-06 con los pines digitales 3 y 2 respectivamente de Arduino. Alimentamos el módulo desde +5V del L298N y conectamos GND a GND de Arduino.
Una pequeña secuencia de imágenes de como se van realizando las conexiones:
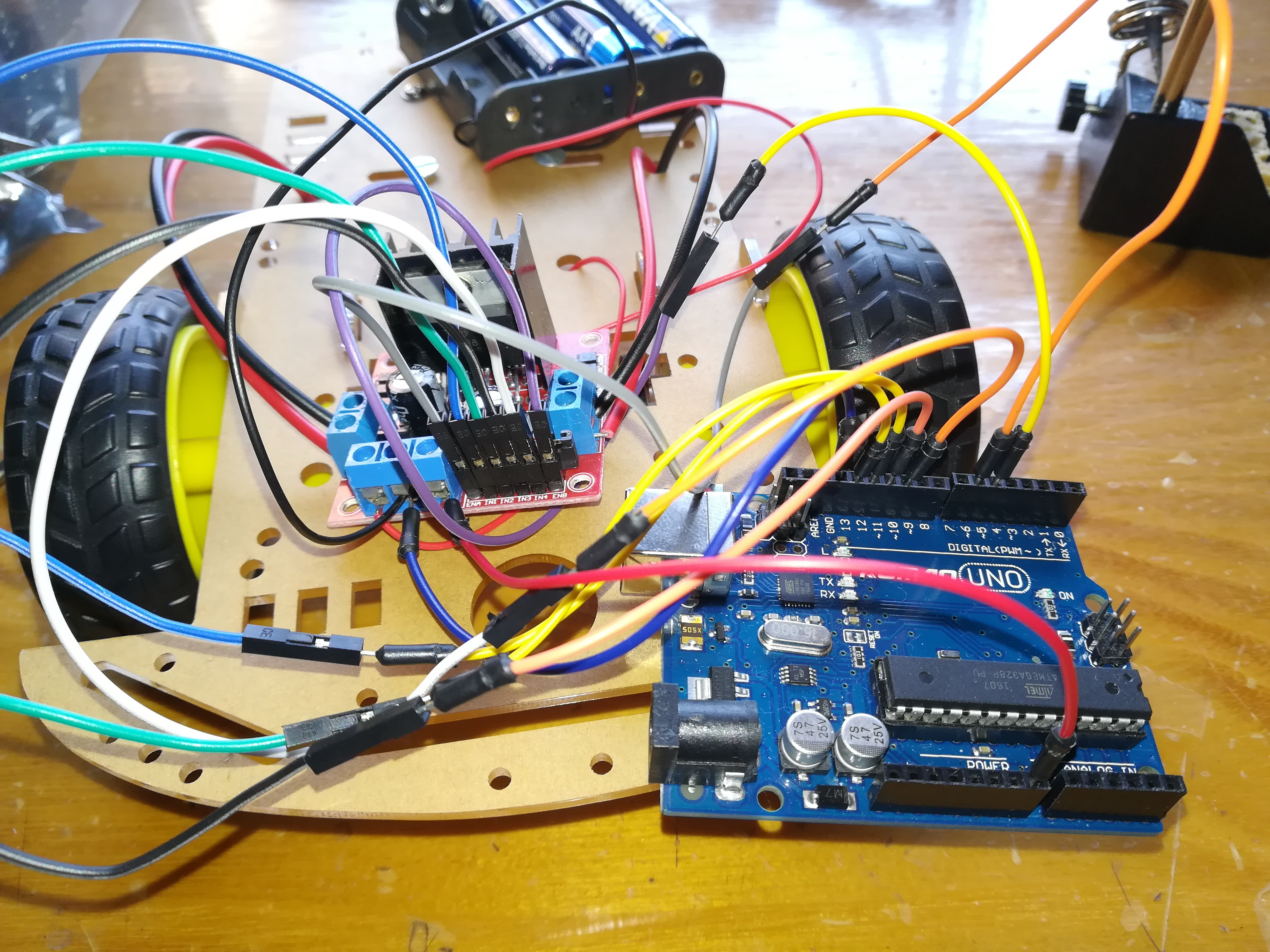

El siguiente paso es cargar el programa que hará funcionar el conjunto.
